



Производители систем автоматического регулирования скорости движения ленты с частотно-регулируемым приводом
Системы автоматического регулирования скорости движения ленты с частотно-регулируемым приводом (ЧРП) – тема, которая часто вызывает недопонимание. Многие считают, что это просто установка частотного преобразователя и настройка параметров. На деле же, это целая комплексная задача, требующая учета множества факторов, от характеристик самой ленты до специфики технологического процесса. В этой статье я постараюсь поделиться своим опытом, рассказать о типичных проблемах и подходах к их решению. В основном, мы работаем с пищевой промышленностью и целлюлозно-бумажным производством, там требования к точности и стабильности скорости ленты особенно высоки.
О чем эта статья
Мы затронем ключевые аспекты систем автоматического регулирования скорости движения ленты, разберем распространенные ошибки при их проектировании и внедрении, рассмотрим примеры успешных и не очень реализованных проектов. Постараюсь не углубляться в технические детали до изнурения, а скорее поделиться практическим опытом и интуицией, которые накапливаются годами работы в этой сфере.
Типы систем регулирования и их особенности
Первое, что нужно понимать – существует несколько типов систем управления ЧРП. От простого механического регулирования скорости на основе обратной связи от датчика положения ленты до сложных систем с использованием ПИД-регуляторов и адаптивного управления. Выбор конкретного типа зависит от требуемой точности, динамических характеристик и бюджета. Мы, как правило, предпочитаем использовать PID-регуляторы, но с грамотной настройкой и добавлением фильтров для снижения влияния пульсаций напряжения и помех.
Не стоит забывать и о роли датчиков. Простые энкодеры могут быть недостаточно точными для некоторых применений. Более продвинутые варианты, такие как инкрементные энкодеры с высоким разрешением или абсолютные энкодеры, обеспечивают более стабильную и надежную обратную связь. Но, конечно, и стоимость их выше. В одном из проектов мы столкнулись с проблемой 'проскальзывания' ленты из-за неточной калибровки энкодера. Потратили кучу времени на диагностику, в итоге выяснилось, что проблема была в неправильном подключении и настройке датчика.
Распространенные ошибки при проектировании и внедрении
Самая распространенная ошибка – это недооценка роли параметров ленты. Материал, толщина, ширина, натяжение – все это влияет на то, как лента будет реагировать на изменение скорости. Часто заказчики предлагают готовое решение, не учитывая специфику их ленты. В результате, система может работать некорректно, лента будет проскальзывать, а производительность будет снижена.
Еще одна распространенная ошибка – это неправильный выбор частотного преобразователя. Необходимо учитывать не только мощность, но и тип нагрузки. Например, для ленты с высокой инерцией требуется преобразователь с достаточным запасом по мощности и способностью к быстрому разгону и торможению. Некорректный выбор преобразователя может привести к его перегреву и выходу из строя. Мы неоднократно сталкивались с ситуациями, когда заказчики пытались сэкономить на преобразователе, что в итоге привело к гораздо большим затратам на ремонт и простои.
Подбор и настройка ПИД-регулятора
Настройка ПИД-регулятора – это искусство. Не существует универсального алгоритма, который подходит для всех случаев. Приходится экспериментировать с параметрами P, I и D, чтобы добиться оптимальной производительности. Обычно начинаем с минимальных значений и постепенно увеличиваем их, пока не получим стабильную работу системы. Но важно следить за тем, чтобы не вызвать колебания и перерегулирование.
Автоматические методы настройки ПИД-регуляторов могут помочь, но они не всегда дают идеальный результат. Часто требуется ручная доводка параметров, чтобы учесть особенности конкретной системы. Мы используем различные методы, от простого 'trial and error' до более продвинутых алгоритмов оптимизации, в зависимости от сложности задачи.
Пример из практики: Управление лентой на линии сортировки картофеля
Недавно мы работали над проектом по автоматизации линии сортировки картофеля. Задача заключалась в обеспечении стабильной скорости ленты при изменении интенсивности работы оборудования. Использовали систему автоматического регулирования скорости движения ленты с ЧРП и PID-регулятором. Первоначально, система работала нестабильно, лента постоянно 'дергалась'. После тщательной диагностики выяснилось, что проблема была в сильных пульсациях напряжения в сети. Использование фильтров и стабилизаторов напряжения позволило решить проблему и добиться стабильной работы системы.
Проблемы с обратной связью и их решение
Не всегда обратная связь от датчиков бывает надежной. Могут возникать помехи, задержки, неточности. Это может привести к неверным решениям регулятора и нестабильной работе системы. В таких случаях необходимо использовать методы фильтрации и сглаживания сигнала, чтобы уменьшить влияние помех и улучшить точность обратной связи.
Один из способов решения проблемы – это использование нескольких датчиков и усреднение их показаний. Это позволяет уменьшить влияние отдельных сбоев и повысить надежность системы. Мы также используем методы калибровки датчиков, чтобы компенсировать неточности и обеспечить более точную обратную связь.
Будущее автоматизации ленточных систем
Сейчас активно развиваются технологии адаптивного управления и машинного обучения. Это позволяет создавать системы, которые могут автоматически настраиваться и оптимизировать свою работу в зависимости от изменяющихся условий. Например, можно использовать алгоритмы машинного обучения для прогнозирования нагрузки на ленту и заранее корректировать скорость, чтобы избежать перегрузок. Мы рассматриваем возможности использования подобных технологий в наших будущих проектах.
Еще одним перспективным направлением является интеграция систем автоматического регулирования скорости движения ленты с другими системами автоматизации предприятия, такими как системы управления складом и системы контроля качества. Это позволяет создавать единую систему управления производством и повысить общую эффективность.
Наши услуги
Компания [Название компании – longjunpower-epct.ru] предлагает полный спектр услуг в области автоматизации ленточных систем: от проектирования и поставки оборудования до монтажа, пусконаладки и сервисного обслуживания. Мы работаем с различными типами ленточных конвейеров и используем современные технологии для обеспечения стабильной и надежной работы систем автоматического регулирования скорости движения ленты.
Если у вас возникли вопросы или вам нужна консультация, пожалуйста, свяжитесь с нами. Мы всегда рады помочь!
Соответствующая продукция
Соответствующая продукция

Самые продаваемые продукты
Самые продаваемые продукты-
 MNS низковольтное выкатное распределительное устройство(5)
MNS низковольтное выкатное распределительное устройство(5) -
 ZNY1 Высоковольтный вакуумный выключатель с постоянным магнитом и твердым уплотнением
ZNY1 Высоковольтный вакуумный выключатель с постоянным магнитом и твердым уплотнением -
 PJG53- 1250 Серия 10(6)Y Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения электроэнергии с постоянным магнитным механизмом для использования в горнодобывающей промышленности
PJG53- 1250 Серия 10(6)Y Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения электроэнергии с постоянным магнитным механизмом для использования в горнодобывающей промышленности -
 CZRN01-11 Централизованная система управления транспортом в масштабах шахты
CZRN01-11 Централизованная система управления транспортом в масштабах шахты -
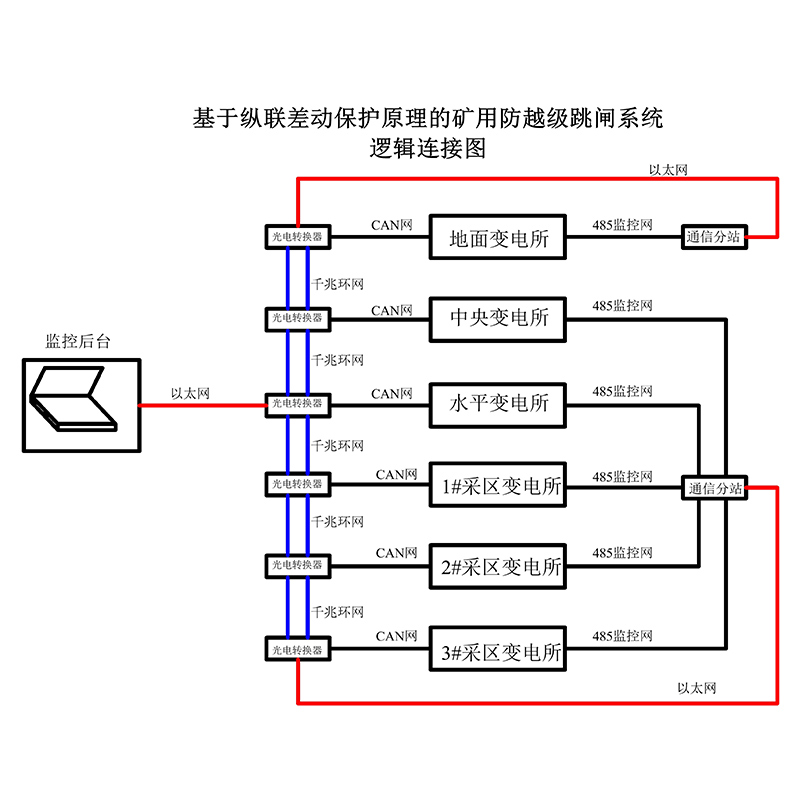 KJ896 Система мониторинга электропитания для угольных шахт
KJ896 Система мониторинга электропитания для угольных шахт -
 Высоковольтный вакуумный контактор CKG3-10(6)
Высоковольтный вакуумный контактор CKG3-10(6) -
 RNLJ-300S гидравлический источник масла электрическая система управления
RNLJ-300S гидравлический источник масла электрическая система управления -
 PJG53A-10(6)Y Взрывозащищенный и искробезопасный механизм с постоянными магнитами Высоковольтное вакуумное устройство распределения электроэнергии для горной промышленности
PJG53A-10(6)Y Взрывозащищенный и искробезопасный механизм с постоянными магнитами Высоковольтное вакуумное устройство распределения электроэнергии для горной промышленности -
 QJGZ53A-10(6)Взрывозащищенный и искробезопасный высоковольтный вакуумный электромагнитный пускатель для использования в горнодобывающей промышленности
QJGZ53A-10(6)Взрывозащищенный и искробезопасный высоковольтный вакуумный электромагнитный пускатель для использования в горнодобывающей промышленности -
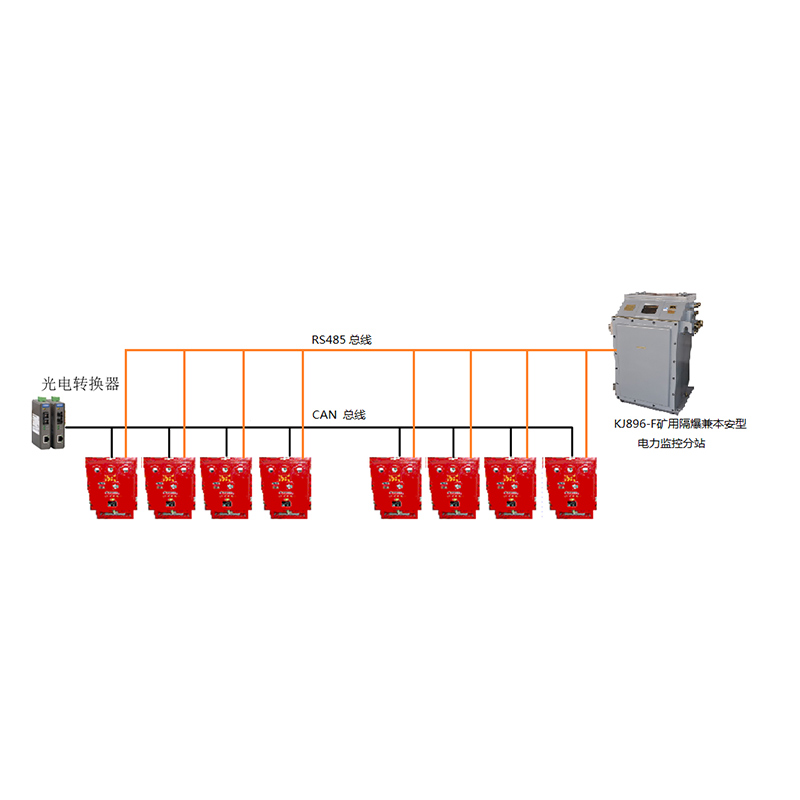 KJ896-F(A) Взрывозащищенная и искробезопасная подстанция мониторинга электропитания для использования в горнодобывающей промышленности
KJ896-F(A) Взрывозащищенная и искробезопасная подстанция мониторинга электропитания для использования в горнодобывающей промышленности -
 VS1G Высоковольтный вакуумный выключатель
VS1G Высоковольтный вакуумный выключатель -
 CZRN01-34 Система онлайн мониторинга и управления для газоперекачивающей станции
CZRN01-34 Система онлайн мониторинга и управления для газоперекачивающей станции
Связанный поиск
Связанный поиск- Знаменитая подстанция мониторинга электроэнергии
- Поставщики вводно-распределительных шкафов
- шкаф распределительный шрс 1
- Оптовая установка в распределительных шкафах
- Основные покупатели вентиляторов местной вентиляции
- Ведущие низковольтные распределительные шкафы
- Купить хороший стартер
- Дешевое оборудование для распределения электроэнергии
- Высококачественные пускатели
- Китайские пускатели 3