



Автоматическое регулирование скорости ленты
Когда говорят об автоматическом регулировании скорости ленты, многие сразу представляют себе частотный преобразователь и датчик. Но на практике всё часто упирается не в выбор устройства, а в понимание того, как сама система ведёт себя в реальных условиях — под нагрузкой, при износе роликов, при изменении материала на конвейере. Вот об этих нюансах, которые в каталогах не пишут, и хочется порассуждать.
Где кроется основная сложность?
Если брать классическую схему с датчиком скорости (энкодером) на хвостовом барабане и частотником, то кажется, что всё просто: обратная связь, ПИД-регулятор... Но на одном из объектов, где мы монтировали систему для Компании Уси Лунцзюнь Электрик (ООО), столкнулись с интересным эффектом. Лента была длинной, около 200 метров, с несколькими перегибами по трассе. Датчик стоял, как положено, но при резком увеличении нагрузки (например, когда на питатель высыпалась крупная партия сырья) система начинала ?дергаться?. Частотник отрабатывал, но скорость всё равно плавала.
Оказалось, дело в упругости самой ленты и её проскальзывании относительно приводного барабана при пиковой нагрузке. Энкодер на ведомом барабане честно показывал изменение скорости, но приводной барабан в этот момент мог уже иметь другую фактическую линейную скорость из-за проскальзывания. То есть обратная связь была верной, но не с того места. Это типичный случай, когда теоретическая схема не учитывает механические потери и упругие деформации тракта.
Пришлось пересматривать подход. Добавили второй датчик контроля натяжения (тензодатчик на натяжном устройстве) и стали использовать его сигнал не для прямого регулирования скорости, а как корректирующий фактор для ПИД-контура. Это не было прописано в исходном ТЗ, но без такого решения стабильности добиться не удавалось. Иногда полезно заглянуть на сайт https://www.longjunpower-epct.ru, чтобы понять, как производители видят типовые решения, но реальная жизнь всегда вносит коррективы.
О выборе компонентов и ?наследственности?
Компания Уси Лунцзюнь Электрик (ООО), чьим предшественником был филиал завода Луншань 9759-го завода НОАК, часто работает с модернизацией старых конвейерных линий. Там стоит специфическое наследство: советские электродвигатели с огромным запасом по перегрузке, но часто — с релейно-контакторным управлением. При внедрении автоматического регулирования скорости встаёт вопрос: менять мотор на современный асинхронный с векторным управлением или попытаться адаптировать старый?
Наш опыт показал, что часто выгоднее и надёжнее второй путь. Старые двигатели, если они в хорошем техническом состоянии, отлично работают с современными частотными преобразователями. Но есть нюанс — обратная связь. Для точного регулирования скорости ленты в системах с плавным изменением нагрузки векторное управление без обратной связи (скалярное) может не подойти. Но установка энкодера на вал старого мотора — отдельная история с переходными фланцами и согласованием.
В одном из проектов мы как раз использовали комплект преобразователя и датчика от поставщика, с которым сотрудничает Longjunpower-EPCT. Важно было не просто подключить, а правильно настроить фильтрацию сигнала с энкодера, потому что на старых валах бывает биение, которое вносит шум в обратную связь. Если фильтр настроить слишком агрессивно, система становится вялой, если слабо — начинаются автоколебания. Долго подбирали, записывали осциллограммы... Это та самая рутина, которую в отчётах не опишешь, но без которой регулирование скорости не будет стабильным.
Интеграция с системой управления и человеческий фактор
Самая совершенная система автоматического регулирования может быть выведена из строя оператором, который привык к старой кнопочной станции. Поэтому при модернизации конвейера для обогатительной фабрики мы сделали неочевидную вещь: оставили старый шкаф управления на месте, но вывели от него только сигналы ?Пуск? и ?Стоп? в новый шкаф с частотником и ПЛК. А сам регулятор скорости вынесли на сенсорную панель, но с имитацией старого ручного задатчика — крутишь виртуальную ручку, видишь изменение скорости.
Психологически это сработало. Люди быстрее приняли новую систему, потому что элемент привычного ручного управления сохранился, хотя внутри всё работало автоматически по заданной уставке или сигналу от датчика загрузки. Кстати, о датчиках загрузки. Часто их сигнал используют для прямого задания скорости ленты: больше поток материала — выше скорость. Но здесь есть ловушка: если датчик загрузки (например, тензометрический на раме) калиброван плохо или его сигнал зашумлен, то система начнёт без конца ускоряться и замедляться, изнашивая механику.
Мы стали ставить простейший фильтр-интегратор на сигнал загрузки, чтобы скорость менялась не рывками, а плавно, с некоторой инерционностью. Это снизило износ приводов. Операторы сначала жаловались, что система ?задумчивая?, но когда увидели, что расход энергии упал и остановки из-за перегрузок прекратились, согласились с таким подходом. Это к вопросу о том, что автоматическое регулирование — это не только электроника, но и правильная логика работы, учитывающая технологический процесс.
Когда автоматика не срабатывает: пример из практики
Был случай на фабрике по сортировке сыпучих материалов. Конвейерная лента с регулируемой скоростью подавала материал на грохот. Всё было настроено, система работала идеально... до первого дождя. Материал (влажная глина) стал налипать на ролики и на саму ленту, масса на тракте выросла, нагрузка на двигатель подскочила. Частотник, отрабатывая по току, пытался сохранить скорость, но в итоге уходил в перегрузку и отключался.
Пришлось экстренно вводить в алгоритм поправку на внешние условия. Установили простой датчик влажности (по сути, контактный щуп) над лентой. Когда он срабатывал, система автоматически снижала задание на скорость на 15% и увеличивала коэффициент усиления в контуре регулирования по току. Это не было идеально, но позволило избежать аварийных остановок. Позже, изучая опыт других предприятий через технические заметки на ресурсах вроде того, что ведёт Компания Уси Лунцзюнь Электрик, я увидел, что для таких случаев предлагают использовать частотники с функцией адаптивного управления моментом, которые сами могут компенсировать изменение нагрузки без перестройки ПИД-регулятора. Но тогда, на месте, нужно было решение ?здесь и сейчас?.
Этот пример хорошо показывает, что любая система автоматического регулирования скорости ленты должна иметь некий запас по гибкости или возможность ручной корректировки режимов. Потому что не все факторы можно предусмотреть на этапе проектирования. Иногда полезно дать технологу возможность с панели оператора ввести поправочный коэффициент, например, при смене типа транспортируемого материала, вместо того чтобы лезть в глубины параметров частотника.
Взгляд в будущее: что ещё можно улучшить?
Сейчас много говорят о предиктивной аналитике и промышленном интернете вещей. Применительно к нашей теме — автоматическому регулированию скорости — это могло бы выглядеть как постоянный мониторинг не только текущей скорости и тока, но и вибрации подшипников, температуры двигателя, равномерности износа ленты. Система могла бы сама предлагать снизить скорость для продления ресурса механизмов, если видит рост вибрации, или, наоборот, увеличить производительность, когда все параметры в норме.
Технически это уже возможно. Некоторые современные частотные преобразователи имеют встроенные функции мониторинга состояния. Осталось только грамотно привязать эти данные к логике управления скоростью. Компании, которые занимаются комплексной поставкой и наладкой, такие как Уси Лунцзюнь Электрик, наверняка уже сталкиваются с подобными запросами от продвинутых заказчиков.
Но лично я пока скептически отношусь к излишней сложности. Для 80% конвейеров достаточно надёжной системы с обратной связью по скорости и, возможно, датчику натяжения. Главное — правильно её установить, настроить и обучить персонал. Самая сложная автоматика ломается, если её обслуживают люди, которые не понимают базовых принципов её работы. Поэтому в каждом проекте мы теперь закладываем не только техдокументацию, но и короткие видеоинструкции для механиков и электриков цеха — как проверить сигнал с энкодера, как считать ошибку частотника. Это, как ни странно, повышает надёжность работы всей системы регулирования скорости больше, чем самый дорогой импортный датчик.
В итоге, возвращаясь к началу, хочется сказать, что тема автоматического поддержания скорости конвейерной ленты — это не про покупку ?волшебного? частотника. Это про комплексный взгляд на механику, технологию, электронику и человеческий фактор. И самый ценный опыт — это как раз те неудачи и нестандартные ситуации, которые заставляют искать нешаблонные решения и глубже вникать в процесс.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
 KXJ8660 Система автоматизации дренажа
KXJ8660 Система автоматизации дренажа -
 KJ896 Система мониторинга электропитания для угольных шахт
KJ896 Система мониторинга электропитания для угольных шахт -
 KYN28-12 а.с. металлическое закрытое бронированное распределительное устройство среднего напряжения(4)
KYN28-12 а.с. металлическое закрытое бронированное распределительное устройство среднего напряжения(4) -
 MNS низковольтное выкатное распределительное устройство(5)
MNS низковольтное выкатное распределительное устройство(5) -
 PJG53- 1250 Серия 10(6)Y Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения электроэнергии с постоянным магнитным механизмом для использования в горнодобывающей промышленности
PJG53- 1250 Серия 10(6)Y Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения электроэнергии с постоянным магнитным механизмом для использования в горнодобывающей промышленности -
 GKG-125010(6) высоковольтное вакуумное распределительное устройство общего типа для горной промышленности(2)
GKG-125010(6) высоковольтное вакуумное распределительное устройство общего типа для горной промышленности(2) -
 CZRN01-35 Автоматическая система управления очистными сооружениями
CZRN01-35 Автоматическая система управления очистными сооружениями -
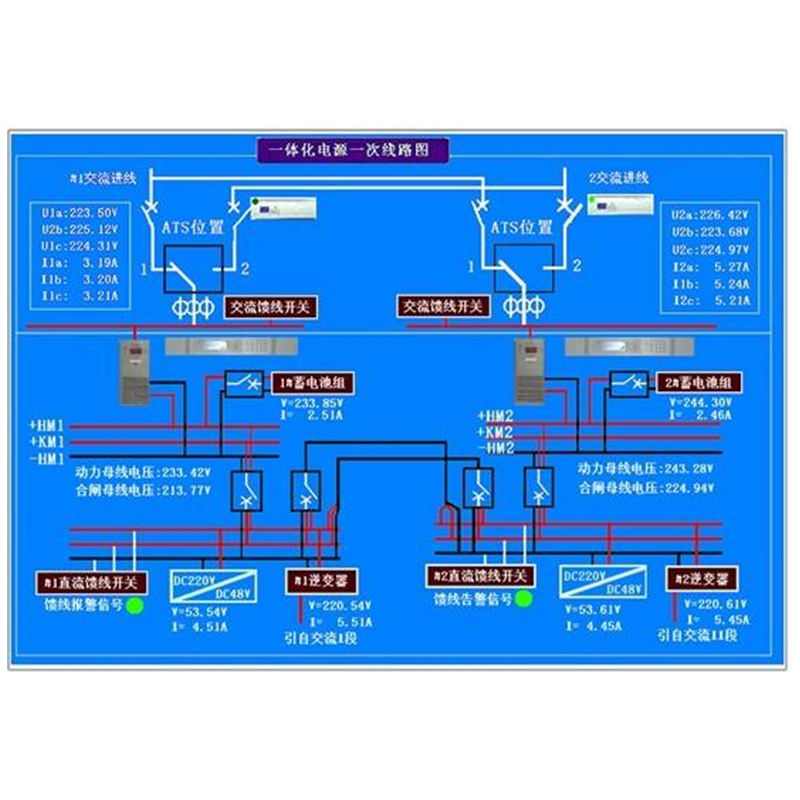 CZRN01-36 Интегрированный источник питания
CZRN01-36 Интегрированный источник питания -
 ZN3-10(6)Высоковольтный вакуумный выключатель
ZN3-10(6)Высоковольтный вакуумный выключатель -
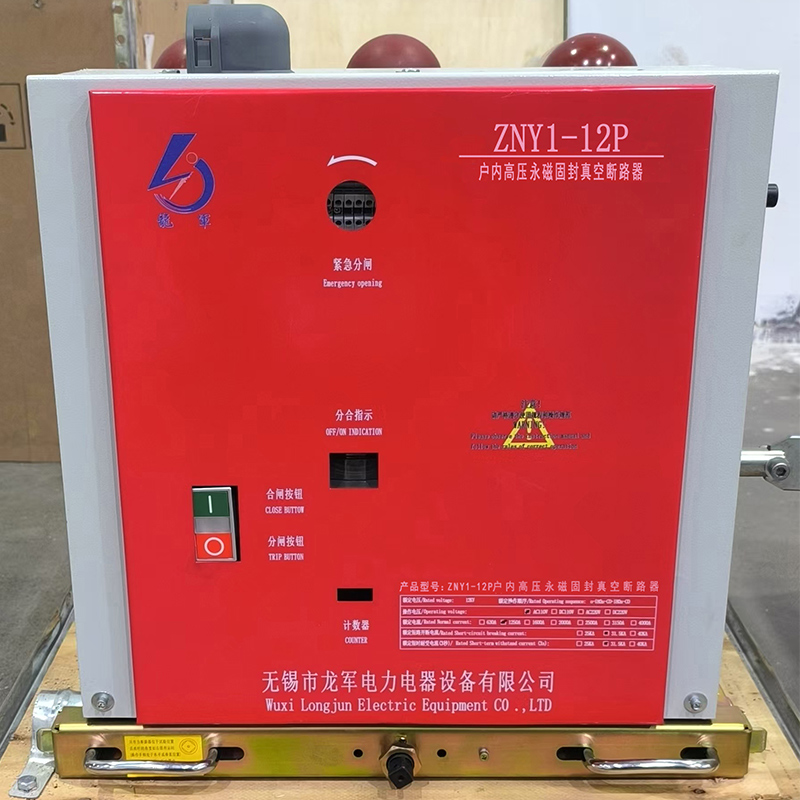 ZNY1 Высоковольтный вакуумный выключатель с постоянным магнитом и твердым уплотнением
ZNY1 Высоковольтный вакуумный выключатель с постоянным магнитом и твердым уплотнением -
 PJG53A-10(6)Y Взрывозащищенный и искробезопасный механизм с постоянными магнитами Высоковольтное вакуумное устройство распределения электроэнергии для горной промышленности
PJG53A-10(6)Y Взрывозащищенный и искробезопасный механизм с постоянными магнитами Высоковольтное вакуумное устройство распределения электроэнергии для горной промышленности -
 PJG53A-10(6)Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения мощности для использования в горнодобывающей промышленности
PJG53A-10(6)Взрывозащищенное и искробезопасное высоковольтное вакуумное устройство распределения мощности для использования в горнодобывающей промышленности
Связанный поиск
Связанный поиск- Распределительный шкаф OEM shr 11
- Превосходные распределительные шкафы в сборе
- Ведущие релейные пускатели
- OEM продукты для шкафов распределения электроэнергии
- какие распределительные устройства
- Отличный распределительный шкаф с коммутационными аппаратами
- Основной покупатель шин для распределительных щитов
- Купить пускатель 12
- Дешевые шкафы распределения электроэнергии
- Оптовая продажа стартеров PML